2D 碰撞檢測包圍盒
在碰撞檢測中可以分為兩個階段 Broad-Phase 和 Narrow-Phase,在 Broad-Phase 中先進行粗略的篩選可能碰撞的物體,之後才會在 Narrow-Phase 做精細的計算判斷兩物體是否產生碰撞。
為何需要分為兩個階段進行?假設場景中有兩顆球在移動,如果要判斷兩球是否產生碰撞,一顆球只需計算和另一顆球的碰撞,若有三顆球則變為兩次,以此類推若有 N 顆球則每顆球需要計算 N-1 次,計算複雜度為 ,這樣的計算量顯然是不能使用的,因此需要 Broad-Phase 先對物體進行篩選。
在 Broad-Phase 通常會先將物體簡化為包圍盒,常見的包圍盒有 AABB(Axis-Aligned Bounding Box)、OBB(Oriented Bounding Box) 等,同時使用四叉樹(QuadTree)、BVH(Bounding volume hierarchy) 等技術將物體所在的空間作分割達到減少計算量的目的。
本文將介紹 AABB、OBB 這兩種包圍盒。
1. AABB(Axis-Aligned Bounding Box)
AABB 顧名思義就是按照和座標軸對齊的包圍盒,四個邊都會和座標軸對齊,因此只需要圖形在座標軸上的極大值與極小值就可以生成一個 AABB,如下圖。
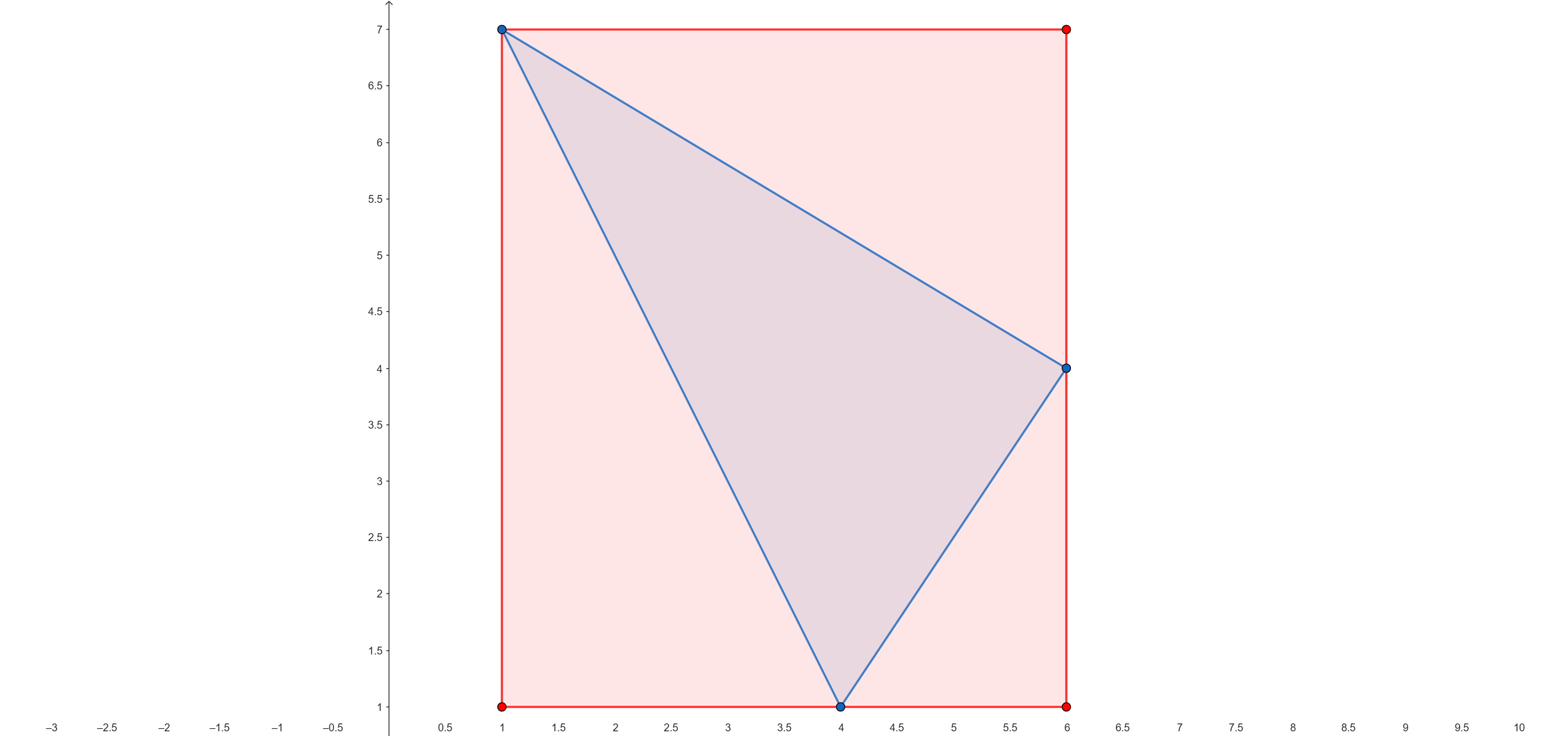
藍色三角形的 AABB 就是紅色矩形。
AABB 的碰撞檢測也很簡單,兩個圖形在每一個座標軸上的投影都會產生重疊,如下圖。
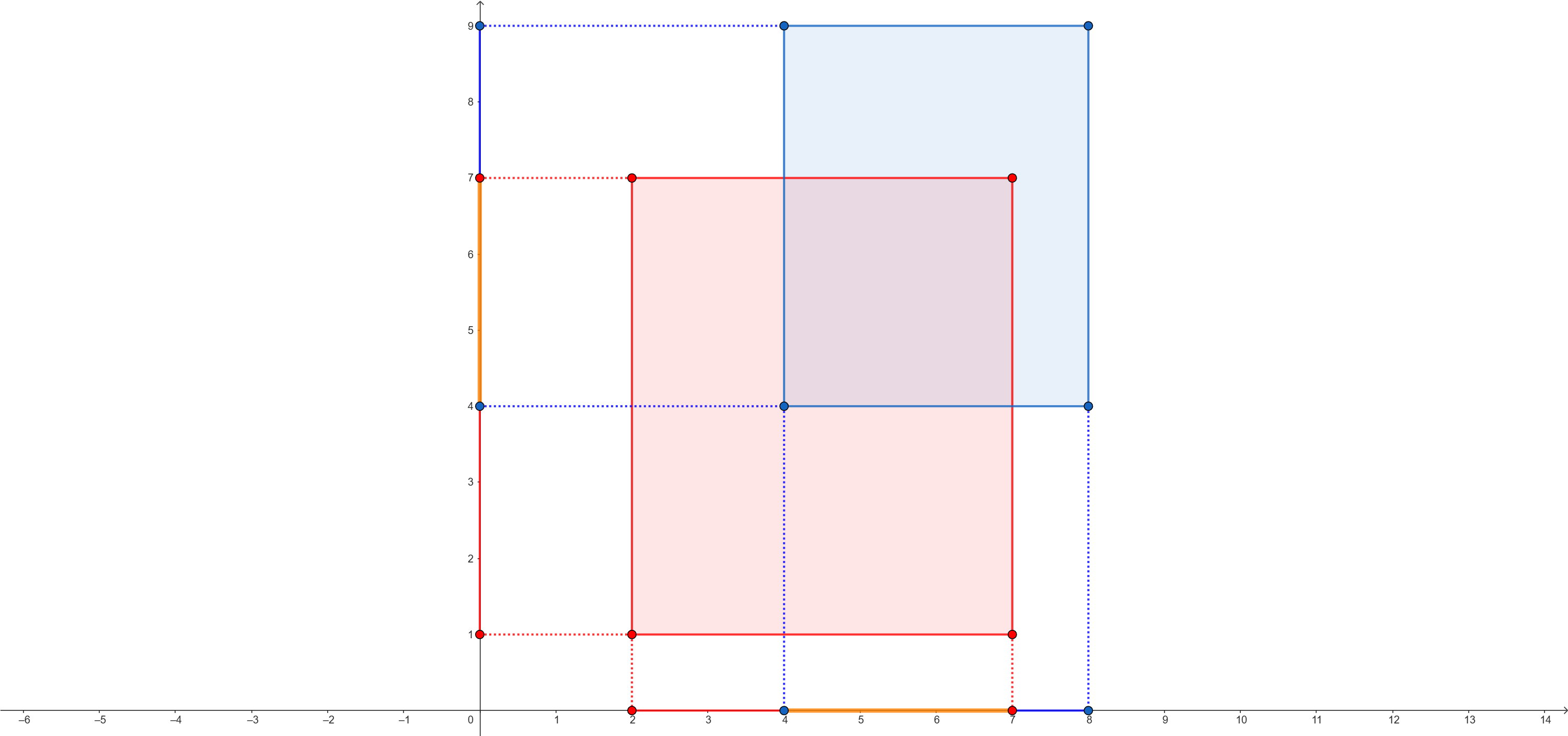
橘色線段即兩包圍盒在座標軸上重疊的部分。
假設有一包圍盒 的頂點分別是 且 ,和另一包圍盒 發生碰撞,包圍盒 則會有一頂點 在包圍盒 的內部,滿足以下條件 。
AABB 在碰撞檢測的計算上十分快速,但有一個缺點,因為四個邊都是和座標軸對齊的,一旦圖形產生旋轉,頂點無法直接同時旋轉使用,必須重新計算新的頂點。
2. OBB(Oriented Bounding Box)
OBB 定向包圍盒,和 AABB 相似,包圍盒的形狀都是一個矩形,但是具有方向性,可以旋轉,生成的方式較 AABB 複雜,會先透過如 PCA(Principle Component Analysis) 等演算法找到適合的軸線,再計算圖形在座標軸上的極大值與極小值,如下圖。
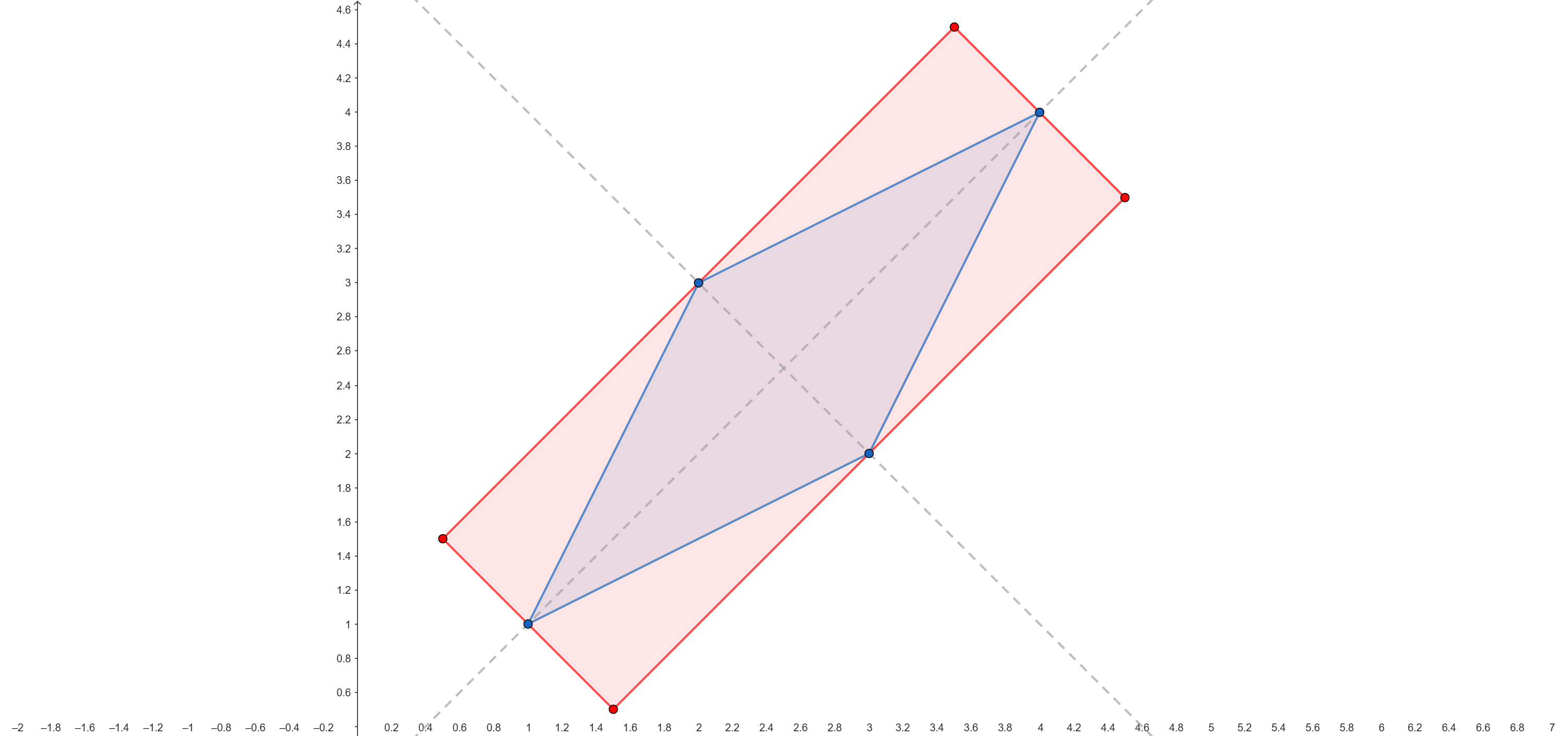
若以兩灰色軸線為 XY 軸,那就是一個 AABB。
OBB 的碰撞檢測更加複雜,由於圖形經過了旋轉,AABB 的檢測方法並不能滿足需求,就需要用到 SAT(Separating Axis Theorem)、GJK(Gilbert–Johnson–Keerthi) 等演算法,計算上的開銷比起 AABB 較大,因此 OBB 較適合使用在 Narrow-Phase 而不是 Broad-Phase。
參考資料